



Sistemas automáticos
a) Dado el circuito digital de la figura de la izquierda, obtener otro que realice la misma función con puertas de dos entradas. b) El sistema de control de lazo cerrado de la figura de la derecha tiene un regulador con ganancia G1 y una planta con ganancia G2 = 50. Determinar el valor de G1 para que el error E sea inferior a 0,1 cuando la entrada X es igual a 1.


Para obtener el circuito simplificado, primero determinamos la expresión booleana de la salida analizando las puertas lógicas del diagrama:
Aplicamos las leyes de De Morgan ( y ):
Simplificamos usando las propiedades del álgebra de Boole ( y ):
Construimos la tabla de verdad para verificar el funcionamiento del circuito:
Resultado: El circuito equivalente que realiza la misma función con puertas de dos entradas es una única puerta AND de dos entradas con las señales y .
b) El sistema de control de lazo cerrado de la figura de la derecha tiene un regulador con ganancia G1 y una planta con ganancia G2 = 50. Determinar el valor de G1 para que el error E sea inferior a 0,1 cuando la entrada X es igual a 1.Datos:- Entrada: - Ganancia de la planta: - Condición del error: Fórmulas:En un sistema de control de lazo cerrado con realimentación unitaria negativa, la señal de error se define como:
Dado que la salida es , sustituimos para hallar la relación del error respecto a la entrada:
Sustitución:
Resolvemos la inecuación resultante para despejar :
Resultado:
Se desea controlar la activación de un sistema de ventilación automático (V) de un invernadero en función de tres sensores: - Sensor de temperatura T (temperatura alta = "1", temperatura normal = "0"). - Sensor de humedad H (humedad alta = "1", humedad normal = "0"). - Sensor de calidad del aire A (calidad baja = "1", calidad normal = "0").El sistema de ventilación debe activarse en cualquiera de los siguientes casos: i) la temperatura es alta y la calidad del aire baja, ii) la humedad es alta y la calidad del aire baja, iii) la temperatura es alta y la humedad es alta. Se pide:
a.1) La tabla de verdad de la función V y su forma canónica.a.2) Simplificación de la función por Karnaugh e implementación con puertas NAND.b) Dibujar un diagrama de bloques de un sistema de control en lazo cerrado e indicar la función de cada uno de los bloques.Se definen las entradas T (temperatura), H (humedad) y A (calidad del aire) y la salida V (ventilación).La ventilación se activa (V=1) bajo las siguientes condiciones: i) Temperatura alta (T=1) y calidad del aire baja (A=1).ii) Humedad alta (H=1) y calidad del aire baja (A=1).iii) Temperatura alta (T=1) y humedad alta (H=1).Tabla de verdad:
Fórmula: Se obtiene la forma canónica de suma de productos (SOP) a partir de las filas donde .Resultado: La función en forma canónica es:
Karnaugh: Se construye el mapa de Karnaugh con los valores de la tabla de verdad.
Simplificación por Karnaugh: Se agrupan los unos adyacentes para obtener la expresión simplificada.Grupo 1 (m3 y m7): Grupo 2 (m5 y m7): Grupo 3 (m6 y m7): Resultado: La función simplificada es:
Implementación con puertas NAND: Para implementar la función con puertas NAND, se aplica la doble negación y el Teorema de De Morgan.
Esta expresión requiere tres puertas NAND de dos entradas para obtener , y , y una cuarta puerta NAND de tres entradas para obtener el resultado final . En total, se necesitan 4 puertas NAND.
b) Dibujar un diagrama de bloques de un sistema de control en lazo cerrado e indicar la función de cada uno de los bloques.Diagrama de bloques de un sistema de control en lazo cerrado:Aquí se describe la estructura del diagrama de bloques, ya que no se pueden "dibujar" directamente diagramas complejos en este formato. El diagrama de bloques de un sistema de control en lazo cerrado se compone de los siguientes elementos interconectados:1. Punto de Suma/Comparador: Recibe la señal de referencia (consigna) y la señal de realimentación del sensor, calculando la señal de error.2. Regulador (Controlador): Procesa la señal de error y genera una señal de control adecuada para el proceso, con el fin de corregir la desviación detectada.3. Actuador: Recibe la señal de control del regulador y la convierte en una acción física o energía que influye directamente en la planta (proceso). En el caso del invernadero, sería el sistema que abre o cierra los ventiladores.4. Planta (Proceso): Es el sistema físico que se desea controlar, en este caso, el invernadero con su temperatura, humedad y calidad del aire.5. Sensor (Transductor): Mide la variable de salida de la planta (la temperatura, humedad o calidad del aire real del invernadero) y la convierte en una señal eléctrica o neumática que puede ser interpretada por el comparador.6. Realimentación (Lazo de realimentación): Es el camino por el cual la señal medida por el sensor se envía de vuelta al comparador, cerrando el lazo y permitiendo que el sistema ajuste su comportamiento en función de la salida real.En este sistema, la salida del ventilador (V) sería el actuador, y los sensores de temperatura, humedad y calidad del aire formarían parte del bloque sensor, que proporciona la realimentación para el control automático.
Función Datos: La función tiene 3 variables ().Fórmulas: Los minterms corresponden a las combinaciones donde la función es 1.Sustitución:Minterms de F: Resultado: Tabla de verdad de :
Simplificación de mediante mapa de Karnaugh:
Agrupaciones:1. Agrupación de los minterms y : 2. Minterm está aislado: Resultado: Función simplificada Función Datos: La función tiene 4 variables ().Fórmulas: Los minterms corresponden a las combinaciones donde la función es 1.Sustitución:Minterms de G: Resultado: Tabla de verdad de (se muestran solo las filas donde la función es 1):
Simplificación de mediante mapa de Karnaugh:
Agrupaciones:1. Agrupación de los minterms y : 2. Agrupación de los minterms y : Resultado: Función simplificada
b) Explicación de la función de un controlador de acción proporcional e integral (PI) en un sistema de control de lazo cerrado.Un controlador de acción proporcional e integral (PI) es un tipo de controlador de lazo cerrado que combina dos modos de control para mejorar el rendimiento de un sistema:1. Acción Proporcional (P): La salida del controlador es directamente proporcional al error actual del sistema. El error se define como la diferencia entre el valor de referencia (punto de ajuste) y el valor medido de la variable controlada. Esta acción proporciona una respuesta inmediata para corregir el error y reduce el tiempo de subida del sistema. Sin embargo, puede dejar un error en estado estacionario (offset) y generar oscilaciones si la ganancia proporcional es demasiado alta.2. Acción Integral (I): La salida del controlador es proporcional a la integral acumulada del error a lo largo del tiempo. Esta acción se encarga de eliminar el error en estado estacionario (offset) que la acción proporcional por sí sola podría no corregir. Al integrar el error, el controlador sigue ajustando su salida hasta que el error persistente se anula. Aunque mejora la precisión en estado estacionario, puede aumentar el sobreimpulso y ralentizar la respuesta transitoria si la ganancia integral no está correctamente ajustada.La combinación de ambas acciones en un controlador PI permite lograr un buen equilibrio entre una respuesta rápida (gracias a la acción P) y la eliminación del error en estado estacionario (gracias a la acción I), sin las complejidades de la acción derivativa. Es ampliamente utilizado en la industria por su robustez y eficacia en una gran variedad de aplicaciones.
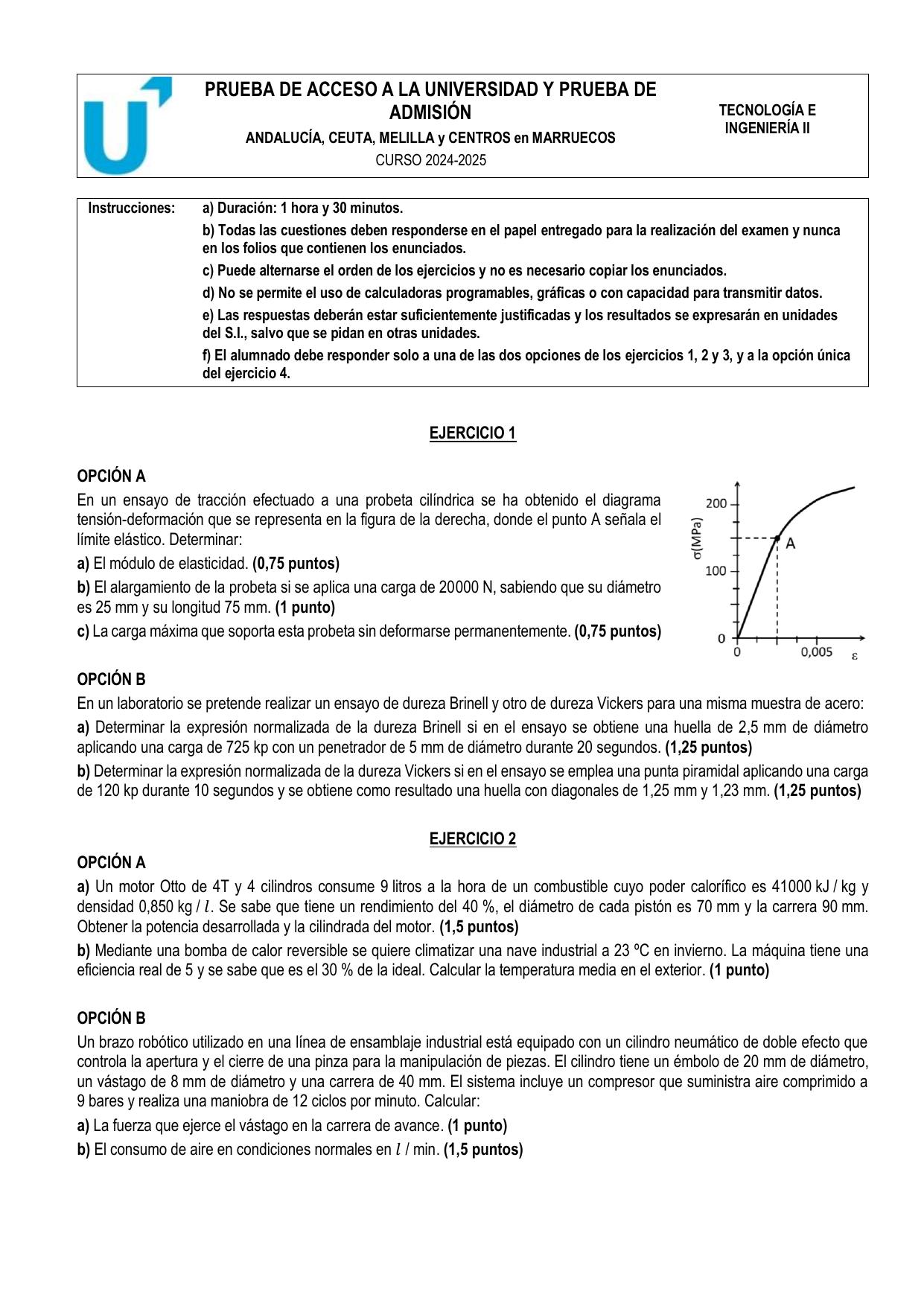
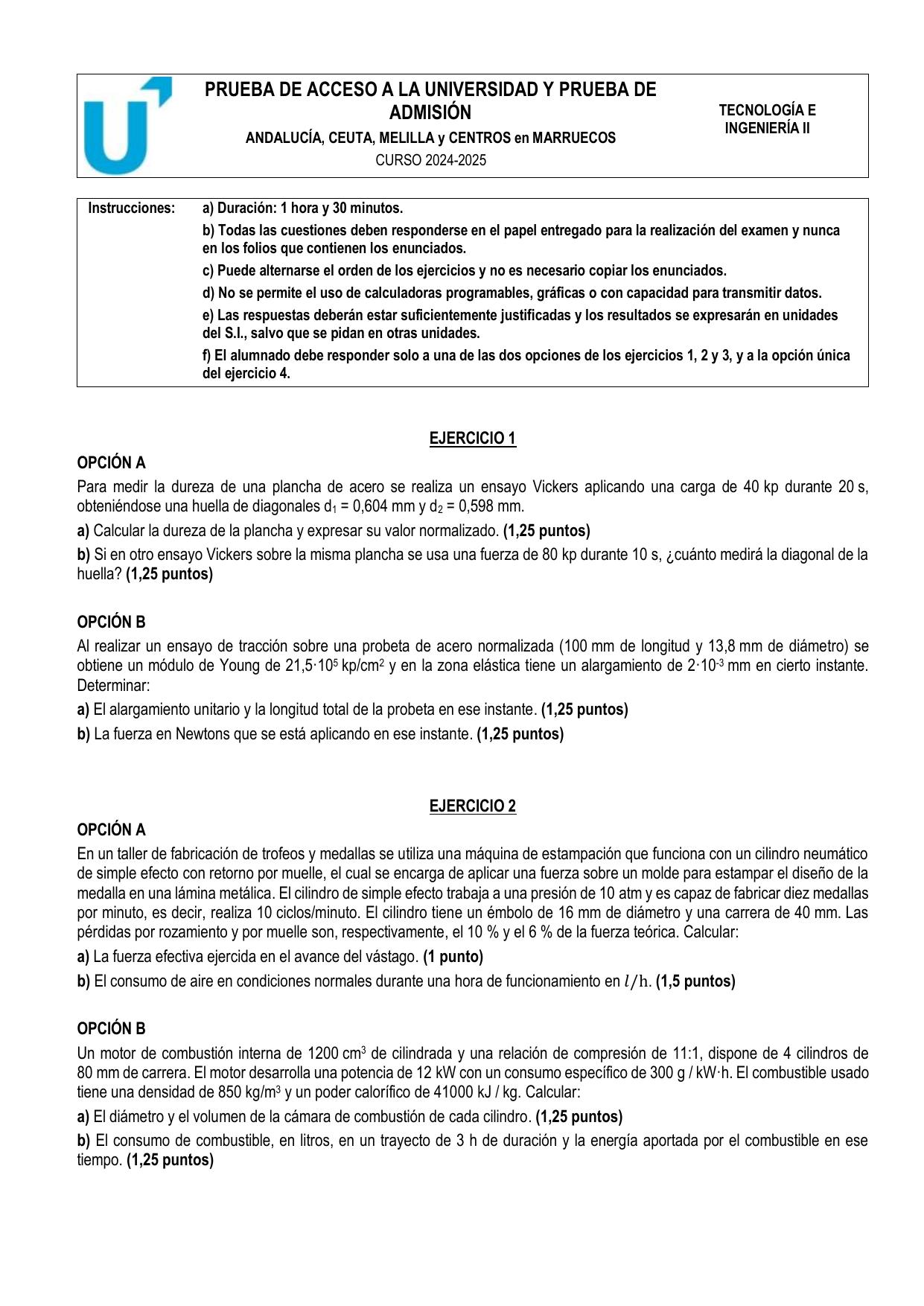
OPCIÓN A En un taller de fabricación de trofeos y medallas se utiliza una máquina de estampación que funciona con un cilindro neumático de simple efecto con retorno por muelle, el cual se encarga de aplicar una fuerza sobre un molde para estampar el diseño de la medalla en una lámina metálica. El cilindro de simple efecto trabaja a una presión de y es capaz de fabricar diez medallas por minuto, es decir, realiza . El cilindro tiene un émbolo de de diámetro y una carrera de . Las pérdidas por rozamiento y por muelle son, respectivamente, el y el de la fuerza teórica. Calcular:
a) La fuerza efectiva ejercida en el avance del vástago.b) El consumo de aire en condiciones normales durante una hora de funcionamiento en .Cálculo de la fuerza teórica y efectiva en el avance del vástago.Datos:
Fórmulas:
Sustitución:
Resultado:
Cálculo del volumen de aire consumido por ciclo a presión de trabajo, su equivalencia en condiciones normales y el consumo total en una hora.Datos:
Fórmulas:
Sustitución:
Resultado:
Para desplazar una pieza en una línea de producción industrial se utiliza un cilindro de doble efecto que tiene un émbolo de de diámetro. La relación entre los diámetros de émbolo y vástago es . Este cilindro está conectado a una red de aire comprimido a de presión y efectúa ciclos por minuto. Suponiendo una fuerza de rozamiento del de la teórica, calcular:
a) La fuerza que ejerce el vástago en la carrera de avance.b) La longitud de la carrera si el caudal de aire medido en condiciones normales es .Datos
Fórmulas
Sustitución
Resultado
Datos
Fórmulas
Sustitución
Resultado

Dado el circuito lógico mostrado en la figura:

El sistema de apertura de una puerta de seguridad S está regulado automáticamente por un sistema compuesto por cuatro interruptores: un interruptor (A) situado en la cabina de control, un interruptor (B) situado justo en la entrada y dos interruptores (C y D) situados detrás de la puerta S. La puerta se abre en los siguientes casos: - Cuando se activa el interruptor A y al menos uno de los interruptores restantes. - Cuando sin activar el interruptor A se activan simultáneamente los interruptores restantes.
a) Obtener la tabla de verdad del sistema de apertura de la puerta y la función de salida S correspondiente.b) Simplificar la función S mediante el método de Karnaugh e implementarla con puertas lógicas.c) Indicar el principio de funcionamiento y las principales aplicaciones de los sensores capacitivos.Se definen los interruptores A, B, C y D como entradas lógicas (1 activado, 0 desactivado) y S como la salida (1 puerta abierta, 0 puerta cerrada). La puerta se abre en dos casos principales:1. Cuando se activa el interruptor A y al menos uno de los interruptores restantes (B o C o D): 2. Cuando sin activar el interruptor A se activan simultáneamente los interruptores restantes (B y C y D): Por lo tanto, la función lógica de salida S es la suma de estas dos condiciones:
Esta expresión se expande a:
La tabla de verdad completa para el sistema es la siguiente:
Se crea el mapa de Karnaugh a partir de la tabla de verdad, agrupando los 1s para obtener la expresión simplificada.
Agrupando los unos en el mapa de Karnaugh:1. Un grupo de 4 celdas en la fila (filas 11, columnas 00, 01, 11, 10), que corresponde a (celdas ).2. Un grupo de 4 celdas que incluye , (columnas 10, 11 en filas 10, 11), que corresponde a (celdas ).3. Un grupo de 4 celdas que incluye , (columnas 01, 11 en filas 10, 11), que corresponde a (celdas ).4. Un grupo de 2 celdas que incluye , , (celdas y ), que corresponde a . Este grupo cubre el minterm que no está cubierto por , o por sí solos.Todas las celdas con 1 están cubiertas por estos grupos. La expresión booleana simplificada es:
Implementación con puertas lógicas:
Los sensores capacitivos detectan la presencia de un objeto mediante la variación de la capacidad eléctrica de un condensador. Están formados por dos placas conductoras (electrodos) que actúan como un condensador. Cuando un objeto se acerca al campo eléctrico generado por estas placas, o entra en él, altera las características del campo (modificando la permitividad dieléctrica entre las placas o la superficie efectiva de las mismas). Esta alteración provoca un cambio en la capacitancia del condensador. Un circuito oscilador, que forma parte del sensor, detecta este cambio de capacitancia y lo convierte en una señal de salida (digital o analógica), indicando la presencia o ausencia del objeto.
1. Detección de nivel: Se utilizan para detectar el nivel de líquidos o materiales granulados en depósitos y tolvas, ya que pueden detectar tanto objetos metálicos como no metálicos.2. Detección de presencia/proximidad: Se emplean para detectar la presencia de objetos sin contacto físico, incluso a través de materiales no conductores como el plástico o el vidrio. Comúnmente usados en líneas de producción para el conteo o posicionamiento de piezas.3. Medida de espesores: Permiten medir el espesor de materiales no conductores, como papel, plástico o vidrio.4. Interfaces táctiles (Touch screens): Son la base de muchas pantallas táctiles y botones capacitivos, detectando el contacto con el dedo humano que actúa como un conductor, alterando el campo capacitivo.5. Detección de materiales: Pueden diferenciar entre diversos materiales en función de su constante dieléctrica.

El diámetro del émbolo de un cilindro neumático de doble efecto es y el del vástago . La presión del aire es .
a) Calcular el valor de la fuerza del vástago en la carrera de avance.b) Calcular el valor de la fuerza del vástago en el retroceso.c) Indicar la función de la unidad de mantenimiento en una instalación neumática.Datos
Fórmulas
Sustitución
Resultado
Datos
Fórmulas
Sustitución
Resultado
La unidad de mantenimiento en una instalación neumática tiene la función de acondicionar el aire comprimido antes de que llegue a los actuadores y elementos de control, garantizando su correcto funcionamiento y prolongando su vida útil. Se compone de tres elementos principales:1. Filtro: Elimina impurezas sólidas, partículas y condensado (agua) presentes en el aire comprimido, evitando daños en los componentes neumáticos.2. Regulador de presión: Mantiene una presión de trabajo constante y adecuada para el sistema, independientemente de las fluctuaciones de presión en la red de alimentación o del consumo de aire.3. Lubricador: Introduce una fina niebla de aceite en el flujo de aire para lubricar las partes móviles de los elementos neumáticos (válvulas, cilindros), reduciendo el rozamiento y el desgaste.

Un dron de cuatro motores lleva a bordo un circuito digital que ayuda a garantizar la seguridad del vuelo. Se quiere diseñar este circuito para gestionar una señal de alarma que se active () cuando fallen dos o más motores del sistema aéreo. Estos fallos en los motores se indican mediante cuatro señales de control de avería , , y , cuyas salidas toman el valor “” si el motor correspondiente está averiado.
a) Obtener la tabla de verdad para la función , así como su expresión en forma canónica.b) Simplificar la función por el método de Karnaugh e implementarla con puertas lógicas.c) En relación con los sistemas de control, explicar las diferencias entre los sistemas de lazo abierto y los de lazo cerrado. Representar los diagramas de bloques de ambos sistemas.La señal de alarma se activa ('1') cuando dos o más motores están averiados. Los fallos de motor se representan con las señales , donde '1' indica avería.
La expresión canónica en forma de suma de minterms () se obtiene de las filas de la tabla de verdad donde la salida es '1'.
Se traslada la tabla de verdad al mapa de Karnaugh para identificar grupos de '1's adyacentes y simplificar la expresión.
Se agrupan los '1's en el mapa de Karnaugh para obtener la expresión simplificada. Los agrupamientos posibles son:
• Grupo (m12, m13, m15, m14)
• Grupo (m10, m11, m14, m15)
• Grupo (m9, m11, m13, m15)
• Grupo (m6, m7, m14, m15)
• Grupo (m5, m7, m13, m15)
• Grupo (m3, m7, m11, m15)
La expresión simplificada es la suma de todos estos términos producto, ya que cada uno cubre '1's que no son completamente cubiertos por otros grupos más grandes.
La función simplificada se implementa utilizando seis puertas AND de dos entradas y una puerta OR de seis entradas.
c) En relación con los sistemas de control, explicar las diferencias entre los sistemas de lazo abierto y los de lazo cerrado. Representar los diagramas de bloques de ambos sistemas.Un sistema de lazo abierto es aquel en el que la acción de control es independiente de la salida del sistema. No utiliza retroalimentación (feedback) para ajustar la acción del controlador. La salida se obtiene directamente de la entrada y la función del controlador.Características principales:
• No hay retroalimentación.
• Simples, económicos y fáciles de diseñar.
• Imprecisos frente a perturbaciones externas o cambios en las propiedades del sistema.
• Requieren calibración frecuente si las condiciones cambian.
Un sistema de lazo cerrado, también conocido como sistema con retroalimentación, es aquel en el que la salida del sistema se mide y se compara con la señal de entrada (referencia) para generar una señal de error. Esta señal de error se utiliza para ajustar la acción del controlador y reducir la diferencia entre la salida deseada y la salida real.Características principales:
• Utilizan retroalimentación.
• Más complejos y costosos de diseñar.
• Mayor precisión y estabilidad frente a perturbaciones y cambios en el sistema.
• Capaces de corregir automáticamente las desviaciones.